Doppel-Flanken Verfahren ( Dual - Slope )
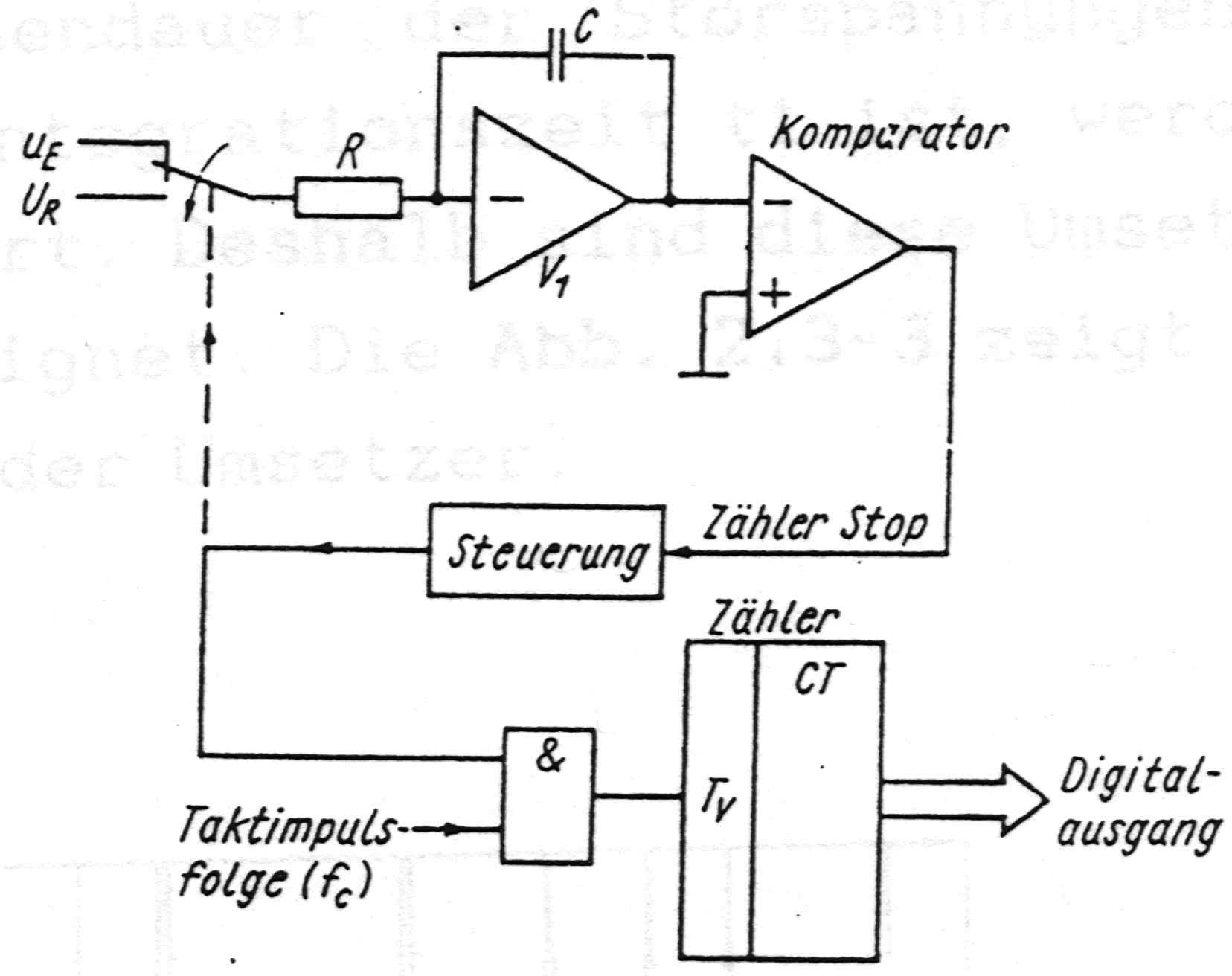
Die Umsetzer nach dem Doppel-Flanken-Verfahren gehören zu den Urnsetzer nach dem Zählverfahren. Die Abb. 2.3-1 zeigt die vereinfachte Schaltungsprinzip eines ADU nach dem Doppel-Flanken-Verfahren. In der Meßtechnik ( z.B. in Digitalvoltmetern ) werden diese Umsetzer sehr oft eingesetzt. Hier erfolgt die Umsetzung in zwei Phasen (siehe Abb. 2.3-2) . In der ersten Phase wird das zu messende analoge Eingangssignal Ue Uber eine feste Zeit tl integriert. Die Ausgangsspannung des Integrators wandert dabei in den negativen Bereich .In der zweiten Phase wird die Referenzspannung Uref umgekehrt zum Eingangssignal an den Integratoreingang geschaltet und integriert. D.h. wenn das Eingangssignal positiv ist, dann wird die negative Referenzspannung integriert. Deshalb wird diese Phase auch Deintegrationsphase bezeichnet. Dadurch wird die Ausgangsspannung des Integrators wieder kleiner bis zum Nulldurchgang. Diese Zeit t2 wird bis zum Nulldurchgang hochgezählt und festgehalten. Die Zeit t2 ist proportional dem Mittelwert der Eingangsspannung Ue.
Abb. 2.3-1 Schaltungsprinzip der Doppel - Flanken - ADU
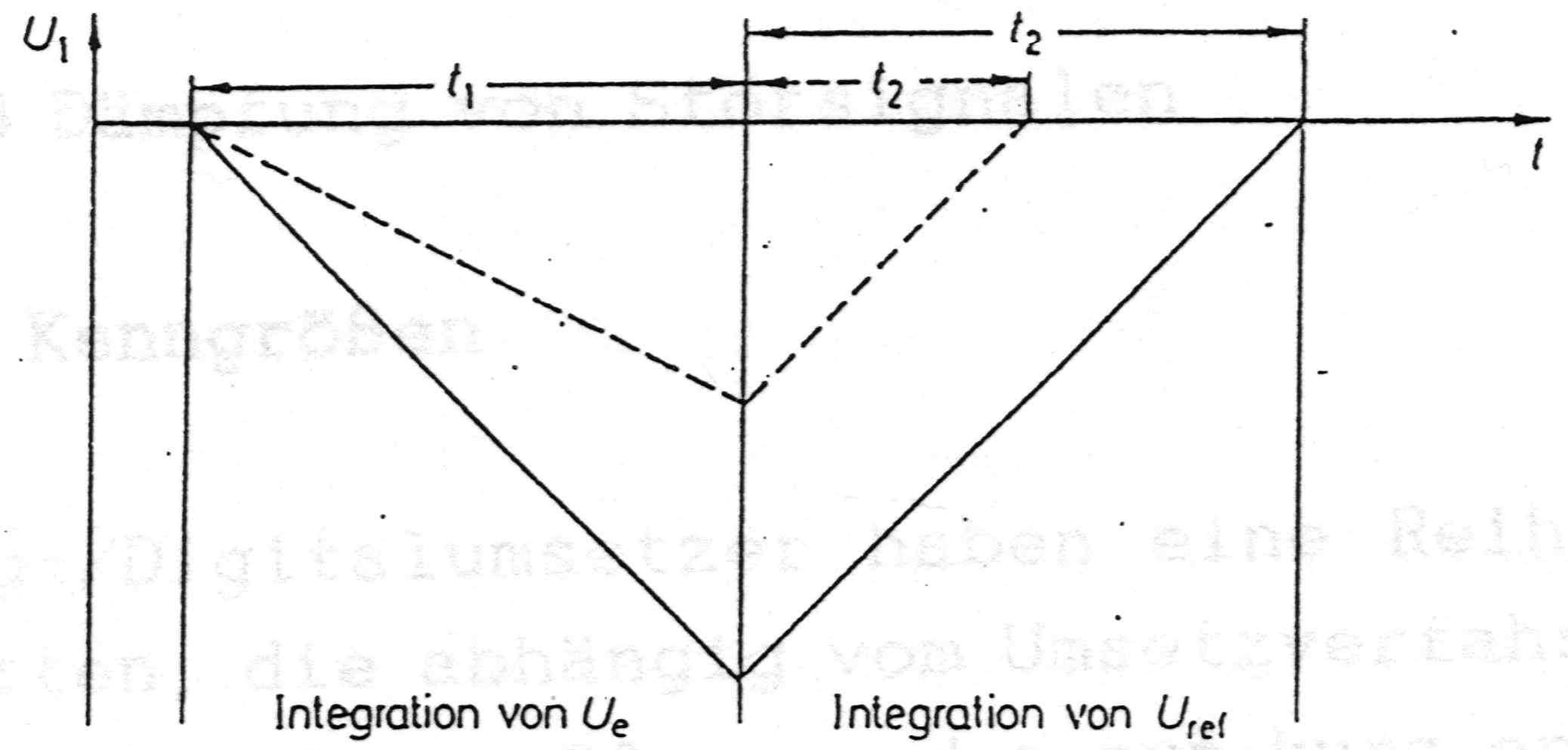
Abb. 2.3.2 Zeitlicher Verlauf der Ausgangspannung vom Integrator
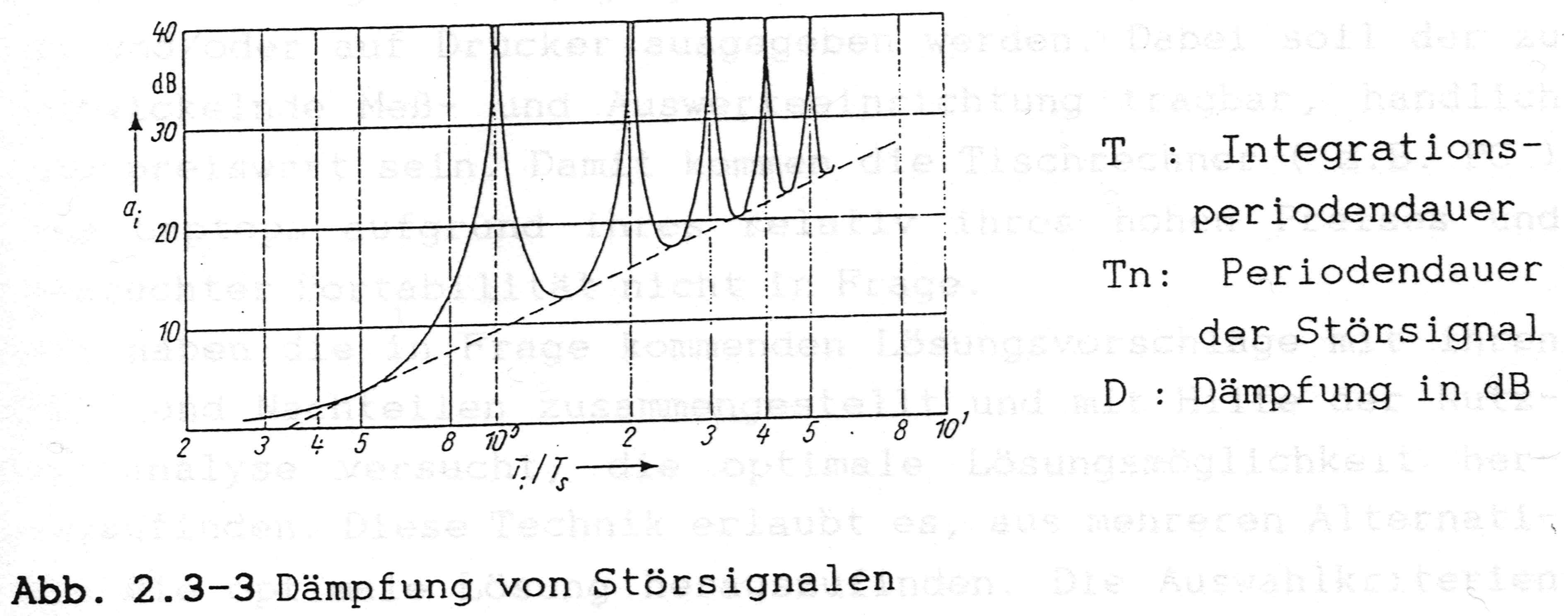
Der Vorteil dieser Methode liegt darin , daß die Integrationszeitkonstante t = R*C nicht in das Ergebnis eingeht , denn sie werden in beiden Phasen berücksichtigt. Da der Mittelwert der Eingangsspannung digitalisiert wird , werden die Wechselspannungen un so stärker abgeschwächt , je größer ihre Frequenz ist.
Wenn die Periodendauer der Störspannungen gleich oder ein Vielfaches der Integrationszeit ti ist, werden sie sogar vollständig eliminiert. Deshalb sind diese Umsetzer für Störunterdrückung gut geeignet. Die Abb. 2.3-3 zeigt die Störunterdrükkung integrierender Umsetzer.
Die Analog-/Digitalumsetzer haben eine Reihe von technischenEigenschaften, die abhängig vom Umsetzverfahren sind.Die wichtigsten Kenngrößen werden nun kurz erläutert
Offsetfehler
: Die Übertragungskennlinie ist vom Ursprung verschoben. Tritt auf, wenn es nicht abgeglichen ist. Verstärkunasfehler : Abweichung der Kennlinie von der idealen beim größten MeßwertLinearitätsfehler
: Es ist die max. Abweichung der Übertragungsfunktion von der idealen GeradeFehlende Kodes
: Diese Fehler liegt vor, wenn in der Übertragungskennlinie ein digitaler Wert nicht auftritt.Ouantisierunasfehler : Es ist ein systembedingter systematischer Fehler, weil eine analoge Größe in ein Digitalwert mit endlicher Anzahl von Bits umgesetzt wird. Es ist ±1/2 LSB groß.